How to get sinusoidal s-curve for a stepper motor

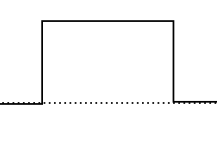
After some experimentation, and delving a bit into the math of motion, I realized there can be a significant difference on the motion of a machine by just making small changes. A common and popular approach to smooth one axis of motion is to use a trapezoidal speed pattern, where acceleration and deceleration are uniformly accelerated movements (aka constant acceleration motion) separated by a portion happening at cruising speed. The problem comes with the fact that, while that approach is simple to understand and to code, it does contain sudden changes in the acceleration, that show as spikes on the acceleration derivative, called jerk. These sudden changes in the acceleration translate into undesired vibration in our machines. Most of that can be eliminated by selecting a motion pattern that does not contain sudden changes of acceleration. If we chose a mathematical function for our speed whose second derivative is continuous, then we reduce system vibration quite a lot. One ma...