A simple plan

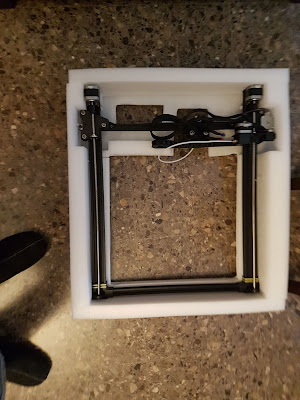
One of the things I did not like about a new printer was that the belt that moved the carriage was not laying parallel to the axis of motion (left) but at an angle, as shown in the picture below (right): Such a belt path is not right as for each inch of motion in the axis a slightly different amount of belt is moved (the hypotenuse of a triangle instead of its long side). Most of the time, the angle is so small the difference is tiny. That is why the arrangement works and printers are printing even though they have this ugly hack. The problem is worse when the carriage is close to any of the two ends, as then one of the angles is not so small and that creates a bigger error. But the question is: how big the error can be? Well, it took me a good part of a weekend to figure that out, among other things because wxMaxima does not like to calculate the intersection of two circles easily . So the first thing I needed was to model the anomalous belt path in a geometric model I co...