One table to run them all

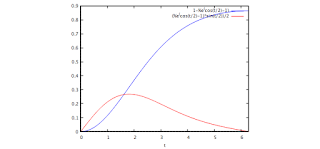
In previous entries, I have delved into the idea of using different shapes for the speed pattern for a motion using steppers and have presented how the timing can be based on a look-up table. Such a table would be pre-calculated and flashed with the firmware. But a single table provides a pattern for a given max speed, acceleration, number of steps and speed shape. You can use that for timing the steps of the motor and it will accelerate properly as many steps as entries on your table. But it won't be practical if we want to change any of these parameters for other movements. The idea I am not yet sure this works as expected, but first tests look ok, finally, as it took me a while to figure this out. I have created a lookup table as the graph above, where each entry contains the delay needed for each step, for a movement of 1000 steps total, where speed will increase to 2Π while time goes till 2Π too. Maximum speed for each different motion pattern will be different th...